Честита Нова Година на всички!
От доста години вече ползвам ОС с отворен код - Linux (Debian, Ubuntu) и с времето търсех приложен софтуер отново с отворен код с който да мога да си върша работата и да решавам различни задачи. Преди десет години беше трудно, но днес нещата стоят доста по-добре. Някой би попитал защо софтуер с отворен код - темата е дълга нека засега приемем, че е вид философия. Ще се опитам накратко да опиша различните видове софтуер, които ползвам. С врмето се надявам да мога да опиша всеки от тях в отделна тема. Сега да започвам:
Софтуер за проектиране на печатни платки - тук моя фаворит е
KiCAD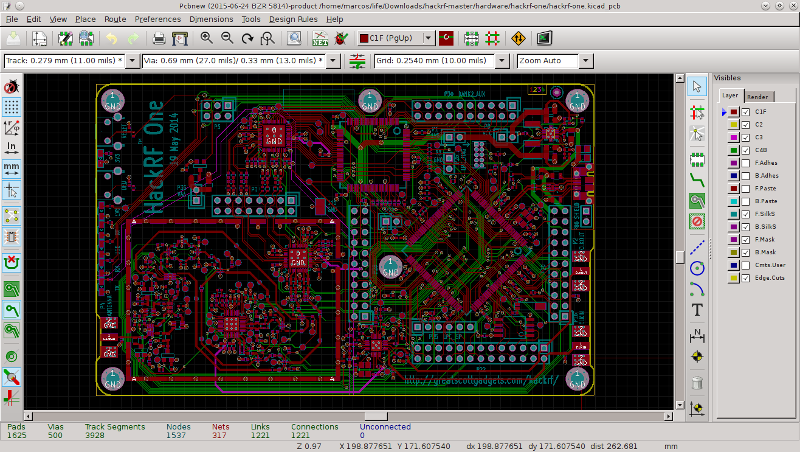
Последните години KiCAD се разви доста, особено след като от CERN се включиха в разработка. Включва в себе си всички основни модули необходими за проектиране на печатни платки:
Schematic Capture - редактор за създаване на електрически схеми с вграден редактор за компоненти и библиотеки към него.
PCB Layout - поддържа създаването на печатни платки до 32 слоя. Поддържа онлайн библиотека за различни видове корпуси в GitHub. Няма вграден ауторутер, но интерактивния рутер е доста добър и може да опроводява високоскоростни диференциални линии. Има вграден 3D Viewer, който позволява да се визуализира реален 3D модел на платката, който може да бъде експортиран към други 3D пакети.
KiCAD има версии за трите основни ОС – Linux, MAC, Wndows, което го прави мулти-платформен. Предимство, но в известна степен и недостатък е, че софтуера непрекъснато се променя и усъвършенства. Разбира се има и публикувани стабилни версии на програмата. Текущата стабилна версия 4.0.5.
Вече има изградена голяма общност от потребители и разработчици в Интернет. Основния форум е тук:
https://forum.kicad.info/. В GitHub има доста допълнителни библиотеки за ел. компоненти и корпуси. Интерфейса на софтуера има превод на български език. Ръководства за работа със KiCAD на различни езици (БГ все още няма), се намират
тук . Ето и
линк в Уикипедя за KiCAD.



 Научих доста неща за CNC машините покрай проекта и искам да споделя наученото дотук, а и това ще ми помогне да систематизирам проекта. И така нека да започваме. Първо малко данни за машината:
Научих доста неща за CNC машините покрай проекта и искам да споделя наученото дотук, а и това ще ми помогне да систематизирам проекта. И така нека да започваме. Първо малко данни за машината: