Здравейте всички, които винаги са мечтали да проектират и изработят робот! В тази категория от нашия Форум по Роботика, ще научавате най-първите похвати в науката. Ще се запознаете с най-лесната за направа механика, малко по-сложната за изработка електроника, и ще се наложи да се запасите с доста нерви за програмата!

Резултатът? Една наистина сбъдната мечта, а и още принос за българската роботика, която в момента е в начален стадий!
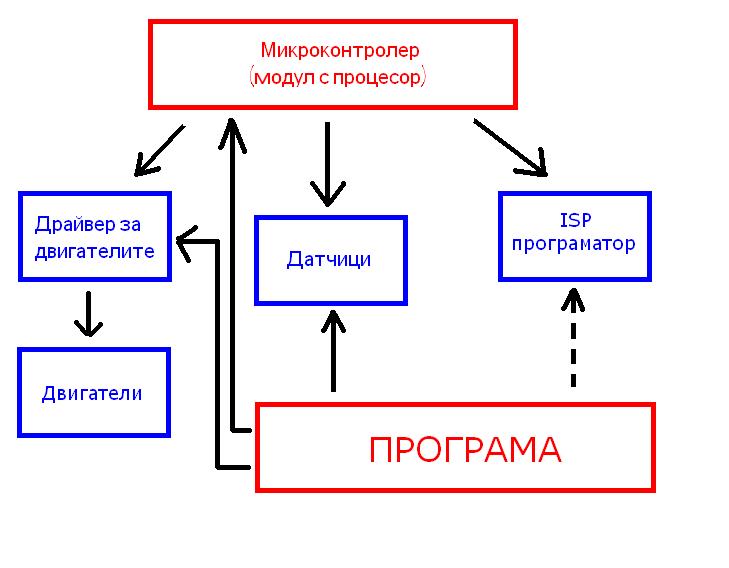
Време е да се запознаем с основната блок-схема, по която могат да се изградят повечето роботи:
(Простете рисуването ми, не ми беше силата в училище..

:lol: ).
И така, нека разгледаме схемата и я разберем.
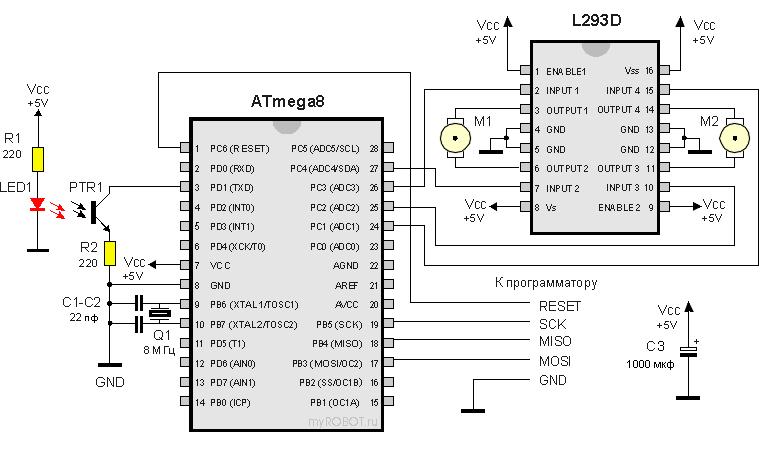
1. За да работи един робот, му е нужна основна платка. Това е модулът с процесор, или накратко Микроконтролер. В този процесор ще се съхранява алгоритъма или програмата на нашия робот. Обикновено се състои от PIC или Atmel (серия АТ, или Tiny) микрочип, кварцов кристал и два кондензатора към него. Останалите неща, като копче за изпразване на съхранената в процесора информация е лукс.
2. Следващата ни стъпка ще е "Драйверът за двигатели". Той е пряко зависим от Микроконтролера. Свързва се с него, и е желателен (отбелязвам желателен, не задължителен!) за правилното функциониране на робота, тъй като може да се сблъскате със сериозни проблеми откъм двигателите. Лично аз, обожавам L293D като драйвер на двигатели.
Естествено, можете да ползвате всяка друга ИС, която да е драйвер на двигатели, или алтернативата - транзистори.
3. Този драйвер за двигатели трябва да свържете с моторите. При тях има една малка, но страшно важна подробност! Моторите НЕ могат да се свържат с колелата БЕЗ редуктор! Защо ли? Просто е - роботът ще стане дотолкова бърз, че може да се удари фатално в някоя стена (и/или тавана

... Та така. Редуктори можете да използвате практически всякакви. Можете да ги вземете от много места (най-често играчки), стига да осигуряват предавателно отношение от 1:75 до 1:200. Ако е над 1:200, роботът ви ще стане като охлюв, затова не е препоръчително. Като цяло, това е всичко, което трябва да научите за двигателите на първо време.
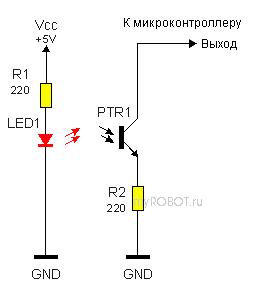
4. Датчиците. За да се ориентира вашият робот в пространството, за да му дадете "слух", "зрение", "осезание" и др., са ви нужни датчици! За радост, има голям избор на датчици! Можете да използвате: Инфрачервени и звукови локатори, Инфрачервени датчици за линии, Сонари за измерване на разстояние до обект, Цветни кръгове на колелата, за определяне на изминатото разстояние, Различни бампери (датчици за допир) и какво ли още не... Те се свързват с Микроконтролера и са пряко свързани с програмата!
5. ISP-програматор. Тук няма нищо сложно, въпреки, че заглавието му звучи точно така! За да вкарате програма в мозъка на робота ви (процесора), ви е нужен програматор. Това е приставката, която свързва компютъра с контролера на робота. ISP означава, че няма да е нужно да махате Процесора от куплунга, и да го слагате на отделен програматор. Можете директно да включите контролера на робота към вашия Персонален компютър и да програмирате спокойно. (вж. категория "Програматори").
6. Последният и най-най-важен елемент в Роботиката е програмата, или алгоритъмът. Написването на програмата е труден и дълъг процес, но без нея, вашият робот ще е една светеща кутия! Това е и силна психологична пречка, която кара повечето начинаещи да загърбят Роботиката. Но, уверявам ви, ако преминете тази граница и успеете веднъж - после е детска работа!
Засега няма да спирам подробно на това. Можете да видите раздел "Алгоритми и програми", за повече информация! ISP-програматорът е свързан с Програмата с пунктирана стрелка, защото не са точно пряко свързани.
И като отчетем факта, че на всички модули трябва да се пусне стабилно напрежение, вие получавате финалния резултат - Робот!
За начални проекти (за някои дори не е нужна програма!) препоръчвам това:
Как да направим най лесния робот (Продължава с 3 части, в които се усложнява конструкцията)
Първият ни Line TracerДайте воля на въображението си в направата на робота, четете статиите и разглеждайте схемите тук, на сайта! Това ще ви улесни много, и финалният резултат ще дойде съвсем скоро!
Пожелавам на всички, успех!!!
Борислав