"Аудио касетата"И така, сигурно сте се чудили какво откъде може да се вземе.. Сега ще ви покажа няколко идеи за това, какво можем да "свием" от една аудио касета!

В Роботиката е много важно да се решават трудни проблеми, с лесни средства! И така, нека започнем....
Първо, гледаме горката касетка... Как спокойно си седи в кутийката! :twisted:
Първото нещо, което трябва да направим е да извадим касетката и да погледнем опаковката и... Та това е идеална кутийка за не голям контролер!

Трябва само да се срежат зъбчетата и вътре (в някои кутийки дори те липсват!) Ето, че вече добихме първата си вещ... Продължаваме нататък!
Е, за съжаление, и тук има спънки. Ако касетата е от модел, който няма малко болтчета в краищата, значи определено не ви е провървяло!
Определено от този вид касетка ще можете да вземете само кутийката!
Но ако предметът е от по-обикновения тип...а именно така:

То вече можете да си потривате доволно ръцете! :twisted: Понякога това не са болтчета, а малки винтове... Тогава е още по-добре! Ще можете да си закрепите контролера за пластмасов корпус - този тип винтове пробиват пластмасата и проникват в нея, захващайки "на мъртво"!
И така, грабваме отвертката и започваме да развиваме болтчетата, докато не я отворим напълно!

Махаме всичко излишно, за да не ни пречи при отмотаването на лентата! И така..обърнете внимание на малките валячета встрани, които държат лентата. Те ще ни потрябват, като малки колелца за микроробот! А може и като съединение на "ставите" на робот с крака! Никога не е излишно!
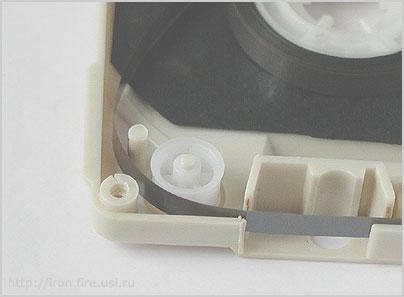
Двете половинки на касетата могат да се използват като не голяма платформа за робота, или като начин за крепление на микроконтролера към шасито... Ако използвате правилно корпуса на касетката и опаковката, ще получите една наистина добра защита на микроконтролера от практически всички природни условия!

В последствие, ще имате куп от тези неща:

Така че....помнете от мен: Не изхвърляйте ненужните работи - ВИНАГИ ще се намери нещо, което може да бъде полезно!
С най-добри пожелания:
Борислав
Снимките са взети от
тук, като статията е авторска!


 - това е програматор, който се свързва с компютъра, и на него се поставя чипът (микропроцесорът). Отрицателната страна на този тип програматори е в това, че трябва чипът да се прехвърля от контролера на програматора и обратно...
- това е програматор, който се свързва с компютъра, и на него се поставя чипът (микропроцесорът). Отрицателната страна на този тип програматори е в това, че трябва чипът да се прехвърля от контролера на програматора и обратно... 


