По молба на Driver_89 ще побликувам статия с това как да си направим крачещ BEAM-робот!
Всъщност, задачата ни не е от най-леките. Механиката на тази буболечка е коварна работа... Навлизаме в непознати води, но ще отразя това, което видях като снимков материал.
За електроника ще използваме схемата ни от "Как да направим най-лесния робот", в която усложнихме конструкцията на нашия BEAM-робот, до 2 мотора и 2 фототранзистора...
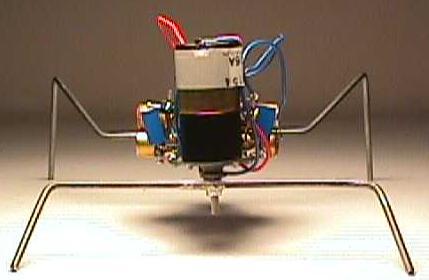
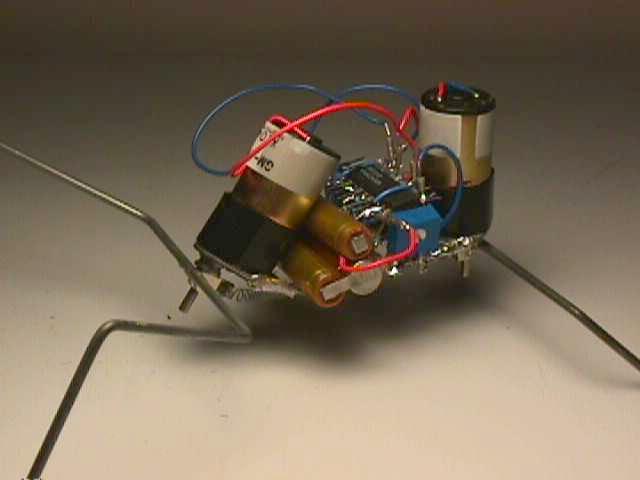
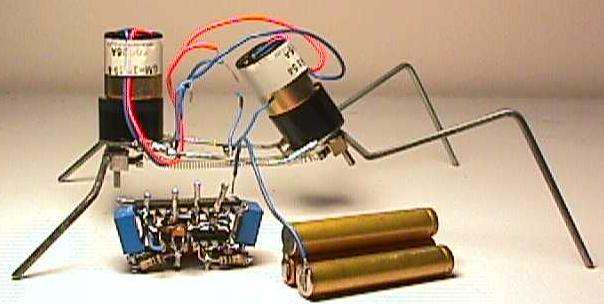
Да започнем със запознаването на механиката.
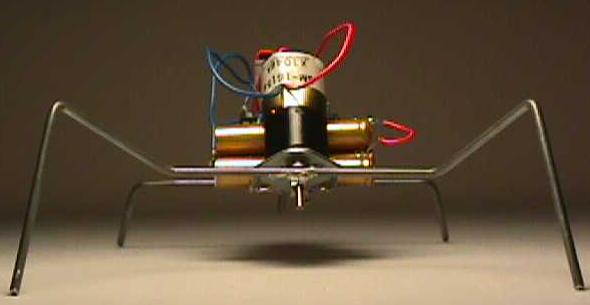
Вижда се, че предният мотор е под 45 градуса, спрямо другия. Това помага на робота да се движи напред и да е със снижена предна част.
Изработка и материал за краката:
Вариант 1: Отивате при малкото си братче/сестриче. Взимате колелото му, режете една от спиците и изчезвате от местопрестъплението.

Вариант 2: Скарвате се с баба си и и отвличате вниманието настрани... Грабвате спиците и за плетене и изчезвате от местопрестъплението.
(Разбира се, това е в кръга на шегата! Материалите са същите, но шегите са за създаване на по-увлекателна статия!!)
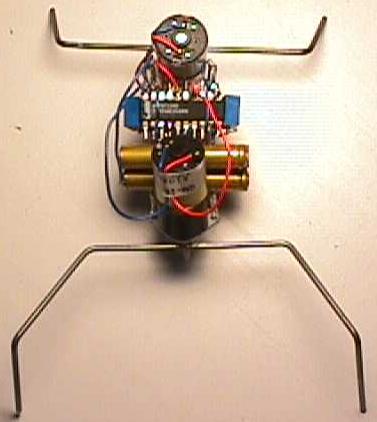
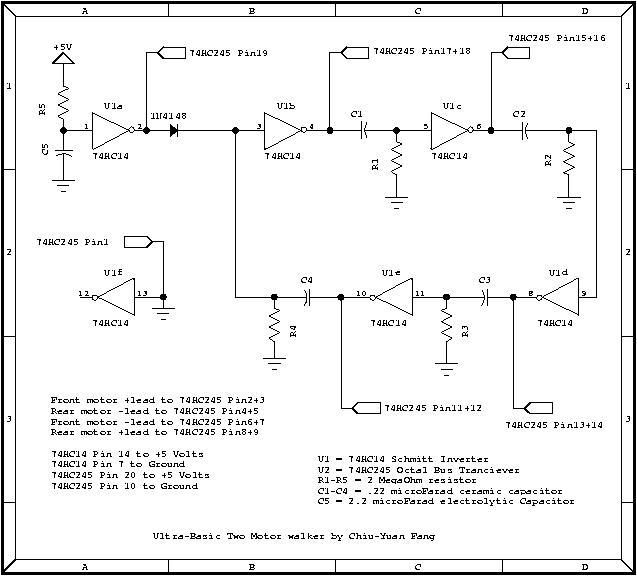
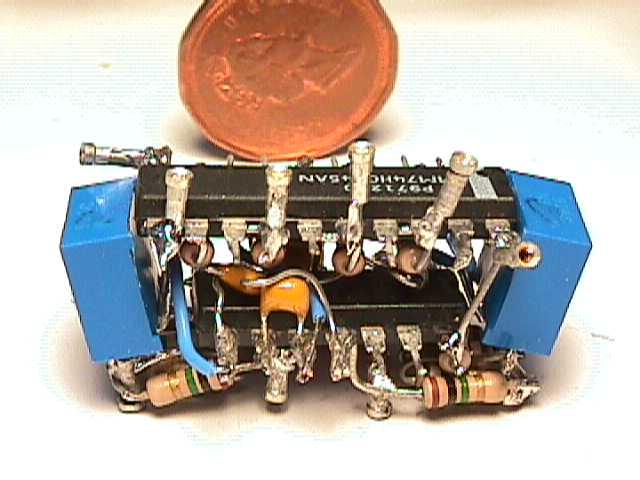
А ето и схемата на робота:
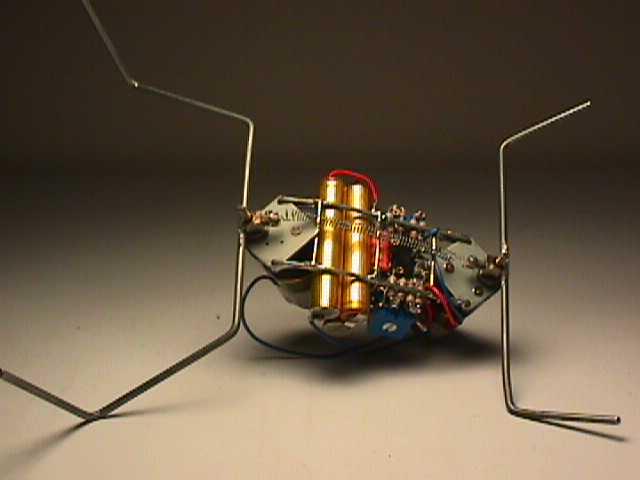
Ето в какъв мащаб са елементите, показани до едно пени:
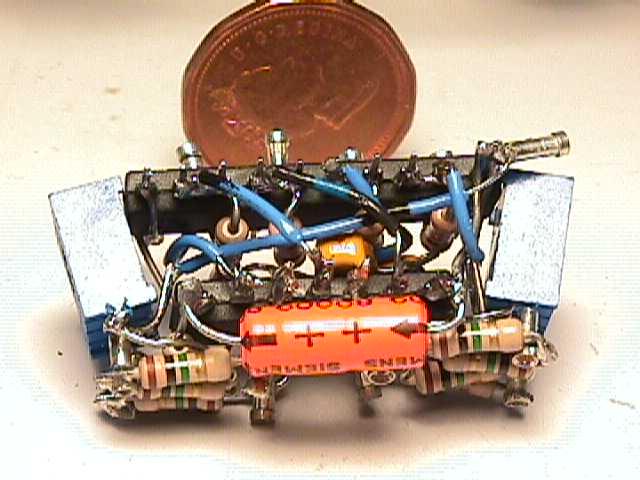
Батерията е взета от части на 9V батерия! Това е опасно и по-добре да не последвате този пример!:
Моторчето, сравнено с пени-то:

Това е за сега! Всъщност, това е лично НЕизпитана техника за направата на BEAM-walcker robot (все още нямам опит с тези машинки), но можете да експериментирате! В статията на нейния автор Чиу-Юан (Chiu-Yuan), никъде не пише за използване на програма! Потърсете datasheet за използваните интегрални схеми! С тях може да е по-лесно, за да разберем, дали основната ИС е програмируем контролер!
Извинявам се за тази дезинформация, но както казах, навлизаме в непознати води!



