Правила за боеве на роботи по Мини-сумо(Преправка и цялостен превод на Международния правилник за провеждане на боеве на роботи в клас Мини-сумо!)

Два автономно-управляеми робота се поставят на ринг.
Всеки робот трябва да избегне падането си извън пределите на ринга, не трябва да допуска изтикването си от противника извън пределите на полето и при това трябва да изтика своя съперник извън тези предели!
Онзи робот, който първи напусне очертанията на ринга, губи рунда. Роботът, победил два рунда се счита и за победител в мача.
След поместването на роботите на ринга и включването им, не се допуска никакво дистанционно управление, захранване, преместване или каквато и да била друга помощ. До свършването на рунда роботът е оставен сам на своите възможности!
При условие на съблюдение на другите правила, роботът може да е направен от всякакъв материал, да има двигател от всякакъв тип, мощност и напрежение. Роботът може да има всякакви процесори, датчици, и друга електроника, и всякакъв тип батерии.
Не се допуска използването на намаляващи теглото приспособления. За измерение се взима параметърът "маса", а не "тегло", защото теглото зависи от гравитационната константа, а масата е независим параметър. Например, абсолютно забранено е установяването на робота с хелиеви балони за намаляване на теглото.
Тъй като състезанието се състои в изтикване, приемущество има по-тежкият робот. Затова разработчикът трябва да се стреми към максимално приближение към допустимите правила за масо-габаритна характеристика.
Технически изисквания към роботитеРазмери и маса:Дължината на робота - не повече от 100 мм
Ширина на робота - не повече от 100 мм
Височината на робота е неограничена
Маса на робота - не повече от 500 гр
В началото на рунда, размерът на робота не трябва да превишава разрешеният (10х10 см). Ограничения за височина няма. След началото на движението си, роботът може да се развърти, падне, раздеки и разшири до неограничени размери!
Как се проверява:
В избягването на спорове по повод на интерпретацията на показанията на аналоговият кантар, за измерението на масата се използва кантар с цифрова скала. Роботът трябва да има малък запас по маса за това, защото трябва да се отчете възможната разлика в показанията на Вашия домашен кантар и показанията на състезанията.
За измерването на габаритите на роботите се използва щателно размерен "съндък" без дъно и капак. Съндъчето се поставя над робота и се спуска. Роботът се класира, ако той се побира без да докосва стените на кутийката.
Всеки рунд роботът е длъжен да започне в това положение, в което е преминал квалификацията. Като пример ще посоча това, че не се допуска роботът, поместен в измерителния съндък вертикално, да започва състезанието в хоризонтално положение.Използване на височината:Неопределената височина на робота позволява използването на електроника, двигатели и други елементи, които не се поместват в габаритите при ограничена височина на робота.
Също така може и творчески да се погледне и на възможностите за използване неограничената височина. Може да се направи падащ робот, който се движи след като измени своето положение от вертикално в хоризонтално. Може да се направи спускащо се рало, като на булдозер или разгъващи се панели от всички страни/
Безвредност:В течение на цялото време, поведението на робота не трябва да бъде оскърбително, не разрушително и не пагубно за хората, роботите или оборудването! Това е неизменим принцип и няма значение, било ли е поведението на робота преднамерено или непреднамерено!
По време на проверката или в което и да е друго време, в течението на състезанието, съдиите могат да определят изменения или модификации на роботът, за съблюдаването на правилата на безвредност. Пагубните роботи не се допускат до състезание или се дисквалифицират след това, ако техните вредни качества бъдат доказани по-късно или са забелязани в процеса на боя.
Също така, съдиите проверяват, ще издържи ли конструкцията на робота сблъсъци, противостояние и други физически превратности на съдбата в процесът на борба.
Също ака, съдиите проверяват, ще издържи ли конструкцията на робота сблъсъци, защита и други физически преврати на съдбата в процеса на състезанието. Могат да бъдат направени предложения за укрепване на конструкцията за постигане безопастността на робота. Слабите роботи могат да бъдат допуснати на състезанието на свой собствен риск и отговорност.
По време на състезанието, съдията отбелязва, ако загубата на робота е породена от недостатъците в конструкцията му. Отговорността за неизправности, причинени от стърчащи кабели и други детайли, пада на робота, имащ тези неизправности.
Във всеки един момент сумоботът не трябва:
- да изхвърля дим или огън
- да протича, да се цапа или да се разпада
- да разсейва прах, твърди вещества или сажди
- да разпръсква аерозолен спрей
- да хвърля или използва снаряди
- да създава електросмущения, пречещи на нормалното функциониране на робота-противник
- да използва мрежи или връв, за заплитане или изхвърляне
В същото време, някакъв ущърб, причинен от "ралото" на всеки робот, така и при изменяне на стартовото положение или в процеса на борба, е неизбежен! Всички участници се съгласяват с него и той се счита за приемлив, в разумни граници!
Датчик за край на ринга (бялата линия):Роботът-сумист е длъжен да върви спокойно по ринга, от единия до другия му край, и да не пада от него. Роботостроителите са длъжни да се погрижат за това, техният робот да може на време да предели границата на ринга и да не пада от него.
Черната повърхност на ринга много добре контрастира с ярката бяла линия по края му, която лесно може да се забележи от датчиците. По-малко попълярни са контактните датчици, които определят края на ринга.
Полет:Роботът не трябва да лети или да прави движения, лишаващи го от контакт с повърхността на ринга за повече от 2 секунди!
Разделяне:По време на всеки рунд, роботът може да се разделя на неограничен брой части.
"Лепкави" колела:Забранено е използването в конструкцията на робота лепило, лепнещи колела и други пасивни средства, усилващи сцеплението му с повърхостта на ринга.
Как се проверява?:
Роботът, в изключено състояние, се слага на лист хартия (А4, плътността на листа да е не по-голяма от 90г/м2). След повдигането на робота нагоре, листът трябва да си лежи на мястото.Преконфигуриране на робота:Роботът може да се изменя между рундовете и мачовете, например, при ремонт или заменяне на батерии, или преконфигуриране. Трябва да се има впредвид, че съдията във всеки един момент може да поиска повторна проверка след провеждане на каквито и да било манипулации по робота.
Технически изисквания за рингаРазмер и материал:Ринг за мини-сумо представлява плосък диск с диаметър 77 см. Той се прави от гладък, твърд материал, например, дърво, пластмаса или алуминий (всеки немагнетизиращ се материал).
Горната част на ринга се боядисва или се покрива с твърда гума. Горната повърхност на ринга е матово-черна, като изключим тънката гланцово-бяла граница (Tawara), която е с ширина 2,5 см. Двете стартови линии (Shikiri) са кафеви на цвят. Всички тези области се считат "във вътрешността" на ринга.
Рингът е приповдигнат над повърхността с 2,5 см, за да облегчи задачата на съдиите, в определянето на момента на падане извън него.
Външното пространство около ринга - то е минимум 100 см празно пространство, в което е забранено да има хора, обекти, огньове или друго, което да отвлече или да създаде смущения в работата на роботите. Повърхността в тази област може да бъде в цвят по избор.
Външното пространство и външната стена на приповдигнатия ринг се считат за "извън пределите" на ринга.
Рингът трябва да е установен абсолютно хоризонтално и достатъчно здраво. Най-добрият ринг е този, който има вградени винтове за регулиране на нивото на наклоненост.
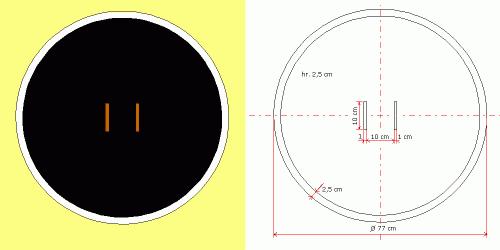 Схема за провеждане на състезанияПроверка, тестове и квалификация:
Схема за провеждане на състезанияПроверка, тестове и квалификация:Всеки робот минава задължителната проверка за съответстващите технически параметри.
В зависимост от нивото на турнира, преди състезанията могат да се проведат тестове и/или квалификация, представляващи следния тест: Всеки робот трябва поне два пъти да изблъска дървено кубче извън пределите на ринга за три опита, всеки от по три минути.
Това правило не е задължително, и не носи дисквалификация на роботите, неуспели да изтикат тестовия куб извън пределите на ринга. Поради факта, че участниците са пръснали време и пари, за създаването на роботите, това е достатъчно основателна причина да се състезават. Освен това е възможно роботите да имат програмни алгоритми, използващи за изблъскване масата и скоростта на движение на изтикания робот. Такъв робот няма да може да реагира на неодушевен предмен.
Времето за тестове се отчита като начална квалификация на участниците.
Стартова схема и система за отбор:В зависимост от количеството участници могат да се използват различни стартови схеми и системи за отбор:
-
Едно поражениеРоботът прекратява участието си в състезанието след един загубен мач. Това е най-строгият метод и не е много подходящ за определяне на истинския победител.
-
Двойно поражение (Двойна елиминация)Роботът прекратява участието си в състезанието след два загубени мача. Това е най-предпочитаната практика при голямо количество участници.
-
Кръгова системаВсеки робот се състезава с всеки друг робот по ред. Това може да отнеме много време, но затова пък всеки робот получава шанс да се бори с всеки друг участващ робот и в резултат не само победителят ще бъде определен, но и има възможност за изчисление на рейтинга на всеки един робот.
-
Групова системаРоботите се подреждат в няколко групи, във всяка от която се определя някоя от по-горните схеми. Победителите във всяка група попадат в групата на победителите и се състезават помежду си.
Независимо от избраната система за отбор, организаторите са задължени отрано да съобщят системата на провеждане на турнира, за да могат участниците да се подготвят и да я изучат.
Мач:Роботът трябва да е готов в назначеното за мача време. Организаторите могат да направят разумна свобода на нещатни ситуации, но съдиите са в правото си да начислят поражение в рунда или в целия мач на този робот, който не е бил готов в началото.
В течение на цялото състезание алгоритмите (програмите), параметрите, компонентите и отделните части на всеки робот могат да се изменят, преконфигурират за конкретния противник или за конкретния ринг. При това, по правило се изисква при всички изменения на робота, поне една негова част, която го идентифицира, да остане непроменена. Всички промени в конструкцията на сумобота трябва да са в рамките на установените ограничения и правила.
Поместване на роботите на ринга:Роботът с по-голям рейтинг или роботът, който току-що е спечелил рундът, се поставя на ринга първи.
Съперникът може да установи своя робот на което и да е място на ринга, не излизайки извън границите на удължената до краищата на ринга стартова линия (кръговата хорда на стартовата линия). Роботът се поставя на старта в същото положение, с което той е преминал квалификацията.
Роботът с по-малък рейтинг или току-що загубил рунд има приемущество, поставяйки го втори на ринга, тъй като разположението на противника му е известно.
Използвайки това приемущество, роботът може да се разположи по такъв начин, че да получи по-голям шанс за победа.
След поставянето на първия робот не се допуска изменение на неговата позиция, след като вече знае позицията на втория робот.
Натискане на копчето:Роботите се включват с натискането на бутон. След старта не се допуска никакво допълнително управление, команди, преконфигурация и други методи за общуване с робота.
И двамата участника слагат пръсти на копчето за старт и чакат командата на съдията. Ако е открит проблем до командата "Стоп", участникът може да предупреди съдията, че роботът му не е готов и да отстрани причината без наказание.
Освобождаване на територията:След натискането на копчето за старт, участниците незабавно напускат външната област около ринга. В течение на целия рунд не се допуска появяването на хора или предмети около ринга или от вътрешната му страна, за да не създават смущения.
След натискането на копчето за старт роботът е длъжен да започне да се движи в течение на 5 секунди. Заедно с това се допускат сигнални огньове, мигалки и друга сигнализация за обратно броене на робота.
Спиране на старта:По време на обратното броене, участникът, забелязал проблеми в робота си, може да подаде сигнал на съдията и да прекъсне обратното броене. След отстраняването на причината за проблема, роботите отново се поместват на ринга.
Участникът получава предупреждение. След второто предупреждение, получено по какъвто и да е повод в течение на целия рунд, се наказва със загуба (на рунда)!
Това може да е изгодно, ако участникът вижда, че неговият робот е в неизправно състояние и продължението на обратното броене го застрашава от повреда. В този случай загубата на рунда ще бъде по-малкото зло!
Фалстарт:Ако роботът започне движението си по време на 5-секундното обратно броене, това се счита за фалстарт. Участникът получава предупреждение, роботите отново се поместват на старта.
След второ предупреждение, получено по какъвто и да е повод в течение на целия рунд, участникът се наказва със загуба на рунда!
Разработчикът може да се съблазни да програмира таймера на време, по-малко от 5 секунди, за да започне да се движи малко по-рано и да получи шанс за бърза победа, но тази уловка е лесно уловима от съдиите и от съперника и в крайна сметка носи поражение в рунда, а при невъзможно бързо препрограмиране на таймера - поражение във всички следващи рундове!
Аут:Роботът губи, ако която и да е негова част, включително и датчиците за линия, за прикосновение, "мустаци", рало или шасито се докосне до повърхността на пода зад пределите на ринга. Няма значение дали това е станало по причина - избутване от противника, или роботът е паднал самостоятелно.
Роботът, който първи докосне повърхостта зад пределите на ринга, губи, даже ако след него падне и другият робот. Ако съдията е определил, че и двата робота са паднали едновременно, рундът се анулира и започва отначало.
Ако някоя част (която и да е) на робота докосне повърхността на пода, зад пределите на очертанията на ринга, това се зачита като поражение, даже ако цялата останала част на робота е на ринга! Която и да е част, с тегло по-голямо от 5 гр., отронила се от робота зад пределите на ринга означава поражение на робота в дадения рунд.
Ако роботът се приземи зад пределите на ринга върху част от втория робот - на негов контакт-"мустак", на ралото му, или на друга негова част, за загубил се счита именно вторият робот. Това правило се опира на друго, което гласи, че роботът, който първи докосне повърхността зад пределите на ринга, се счита за загубил, даже ако след него веднага пада другият робот.
Не аут:При фалстарт или при прекъсване в рунда поражение не се зачита, даже ако част от робота попадне зад пределите на ринга.
Прекъсване на двубоя:По всяко време след края на петсекундното обратно броене, всеки от участниците може да прекъсне боя, подавайки сигнал на съдията или влизайки във външното пространство на ринга. Отброяването на времето се прекратява, а на участника се регистрира поражение в рунда.
Това може да бъде полезно, ако участникът види, че в резултат на неизправност, неговият робот може да получи повреда. В този случай, поражението в рунда е по-малкото зло!
Също така, всяко въздействие на роботите, например с помощта на ИЧ-излъчватели, ДУ или Лазер, се счита за прекъсване на двубоя с последващо поражение за този участник.
Прекъсване по инициатива на съдията:По усмотрение на съдията, двубоят може да бъде прекъснат в един от следните случаи:
- изтичане на трите минути на двубоя (всеки рунд е по три (3) минути - без изключение)
- отсъствие на прогрес в течение на определено време
- роботите по някаква причина не могат да се докоснат един друг
- роботите се объркват или се блокират по друг начин
- и двата робота се отказват да започнат или и двамата участника сигнализират за спиране на двубоя
В тези случаи съдията определя победителя в рунда по свое усмотрение!
Завършване на рунда:В края на рунда участниците взимат роботите си и се подготвят към следващия рунд. Първият робот, победил в два рунда, печели мача.
Това ограничава общото число рундове. Те могат да бъдат и два - бързи и кратки. Или три, ако след първите два рунда, резултатът е равен (1:1). Обща продължителност на всички рундове - три (3) пъти по три (3) минути, като времето за подготовка на роботите не се счита!
Разбира се, мачът може да завърши още по-бързо, ако един от роботите бъде дисквалифициран или по друг начин губи възможност за продължение на борбата.
Превод: Борислав -
Българският портал по Роботика


 До какво съвършенство е Роботиката в Япония! Радиоуправляеми са!! Представете си, как се управлява нещо такова!
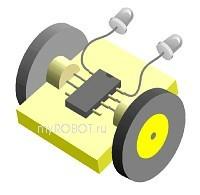
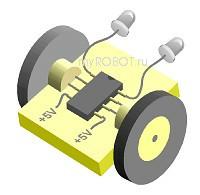
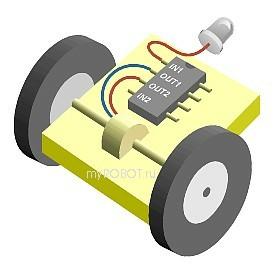
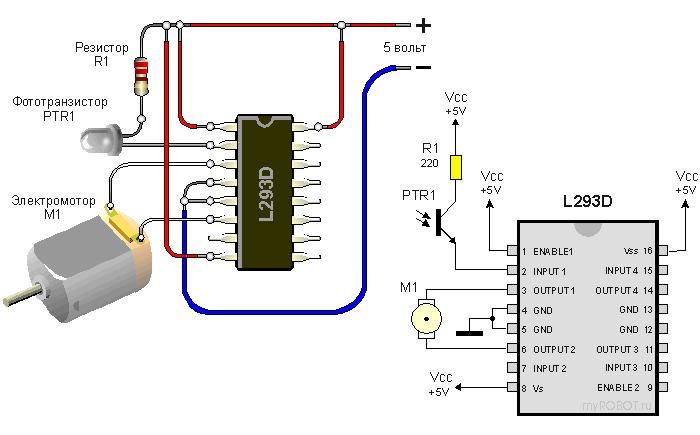
До какво съвършенство е Роботиката в Япония! Радиоуправляеми са!! Представете си, как се управлява нещо такова!  . Та...поразопаковах го снощи, извадих му електродвигателя за вибрираща функция и реших да направя BEAM-робот. Сам по себе си той ще представлява паяк, който се задейства от 1 мотор. Ще снимам подробно изготвянето на робота, и после ще кача снимков материал. Сега ще погледна дали имам всичко необходимо, за да го сглобя. Проблемът ми в случая е да намеря достатъчно малка батерийка на 5V (Едва ли ще намеря слънчева..), защото мисля паякът да е с L293D. Моля, дайде предложения за нещо..
. Та...поразопаковах го снощи, извадих му електродвигателя за вибрираща функция и реших да направя BEAM-робот. Сам по себе си той ще представлява паяк, който се задейства от 1 мотор. Ще снимам подробно изготвянето на робота, и после ще кача снимков материал. Сега ще погледна дали имам всичко необходимо, за да го сглобя. Проблемът ми в случая е да намеря достатъчно малка батерийка на 5V (Едва ли ще намеря слънчева..), защото мисля паякът да е с L293D. Моля, дайде предложения за нещо.. 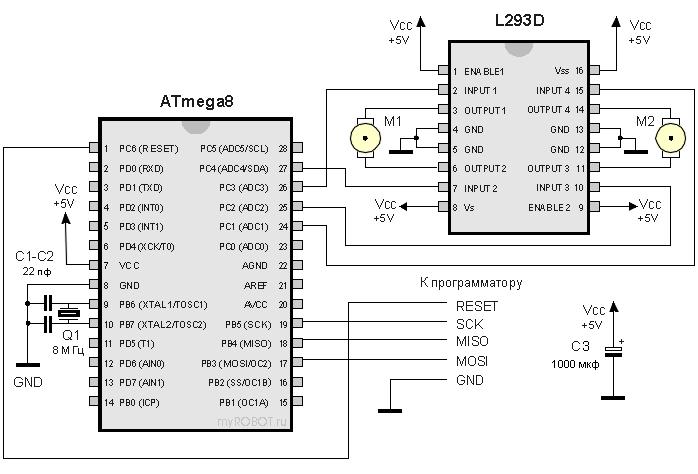
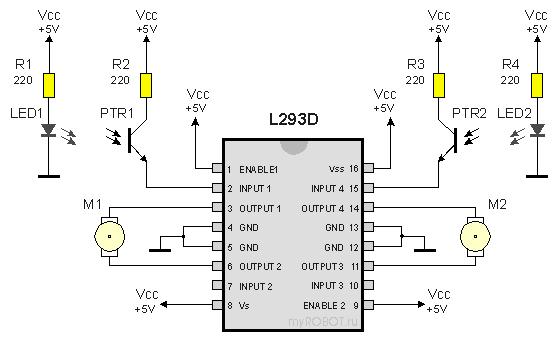
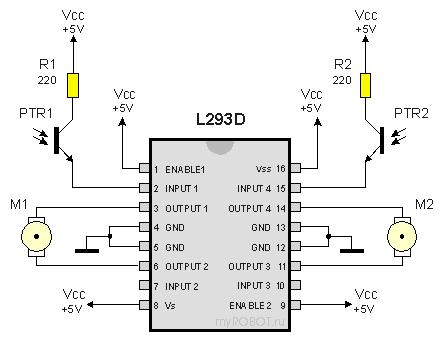
 и разположен в непосредствена близост с тях (на схемата не е указан!).
и разположен в непосредствена близост с тях (на схемата не е указан!).