Сега ще ви представя нещо уникално! Ако имате счупена компютърна мишка (счупена откъм механика), ще ви покажа как да си направите жироскоп, който може да ползвате в механиката на робота си!

Нека започнем... Самата схема е тази:
На схемата е показано почти всичко, затова ще обясня накратко за какво става въпрос. Електрониката на мишката запазваме! Махаме само корпуса и топчето (мишката ТРЯБВА да е с топче!).
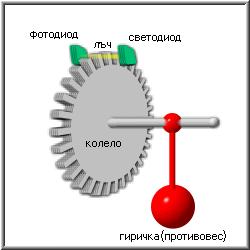
Принцип на действие на датчика: Представете си, че роботът ви се е наклонил и вие искате да разберете колко голямо е това отклонение, за да го коригирате. Гиричката (противовесът) започва да се отклонява (тя е закрепена неподвижно към вала на зъбното колелце) в определена посока. Така лъчът от светодиода минава през зъбците (определен брой) на колелцето и се спира на фотодиода. Всичко това се преобразува от контролера на мишката в импулси, които преминават в контролера на робота. При по-добра програма ще можете да използвате съвсем пълноценно този датчик и ще разберете, че е не само прост за изработка, но и много ефективен!
Една гиричка позволява определянето в една посока (примерно Х). Ако сложете втора, тя ще може да определя X, Y координати... Останалото вече е въпрос на фантазия!
Може да се направи много сложно и много просто!
Въпреки това, драйверът за двигател на компютърната мишка ще се наложи малко да бъде модернизиран, за да се подкара като драйвер на "жироскопа" в компютърния мозък на робота... Но това вече е въпрос на фантазия!
Успех на всички!


