Извинявам се за забавения отговор.

На дадената по-горе схема, като OUTPUT всъщност съм означил GND. Input си е сигналът, както се подразбира.
И така... Измина много време, откакто не съм внасял нещо свежо в темата със сумиста. Разбира се, интересът към него не стихва, а напротив - засилва се с всеки изминал ден.
Освен електрониката, която развивам най-вече в чест на сумиста, на преден план също така е и неговата нова механика. Имам редуктори и колела, които пазя специално за този робот. Съгласно темата за робо-сумото, която засегнахме в сбирката ни 3-ти февруари, давам своята идея за платформа за сумо.
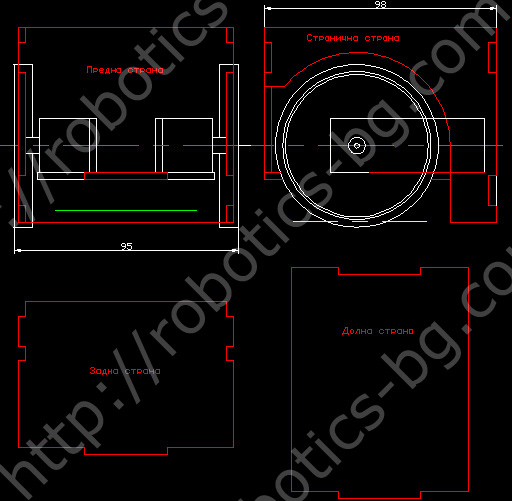
Както се вижда от единствените оставени размери, платформата се побира в 10х10см (9.8х9.5см). "Оръжието", с което е снабден е цялата му предна повърхнина, служеща за рало. Отгоре роботът не е снабден с капак, давайки възможност за повече електроника тип "Бредборд".
Материалът е предвиден 3мм полипропилен или коматекс, изрязани лазерно (лазерното рязане на пластмасови изделия е много по-евтино от рязането на метал, а и по-леко). Стените са залепени една към друга, предотвратявайки евентуално отделяне на секциите. Предвижда се редукторите също да бъдат залепени за долната част на робота, тъй като ще се ползват само и единствено за този проект.
В случай на повреда, лесно могат да се отворят, посредством болтове.
Засега е това, следва поръчката за лазерно рязане и сглобяване.


