Снощи докато обсъждахме с един приятел проект за Line tracer за училище се роди една интересна идея за задвижване. От сега казвам че идеята не е правена с цел да се опрости схемата или да се пестят батерии.
Във въпросната система липсват колела освен за баланс

:shock:
Вместо 2 или повече колела се използва топче от мишка.
Моторчета могат да се използват по няколко начина.
1. 2 мотора разположени на 90 градуса. Така посоката на робота се определя от сбора на скоростите на моторите като вектори. На схемата това са горното и лявото моторчета.
2. В допълнение към 1. се ползва 3-то моторче, което да върти робота около топчето (виж схемата).
3. Отново 2 моторчета, но този път едното единствено задвижва напред робота, а второто е като в 2., въртейки робота и определящо посоката на движението.
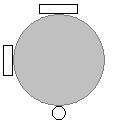
Ето и проста схема:
В центъра е топчето, горното и лявото са хоризонтално разположени валове на моторчета, а долното е вертикално.
Като цяло системата е много подобна на тази на мишката.
Не знам дали се ползва такава система някъде и не знам дали и ние ще я ползваме, но реших че е интересна и си заслужава да се сподели.



