"Датчикът на Хол" е датчик на магнитно поле. Звучи сложно, нали?
Като цяло "Датчикът на Хол" се крие в дълбините на много устройства. При някои, работата е свързана с него, а в други - той е просто заместител на оптроните.
Най голяма концентрация на датчици на Хол е в компютърните вентилатори. Освен тях, във вентилаторите няма почти нищо друго интересно.

Разглобяваме вентилатора. Отлепваме лепенката на задната страна на перката, ако има такава. Гледаме в централния отвор.

Там намираме малка кръгла шайбичка, която успяваме да достигнем с отвертката. По този начин ние ще отворим предната част на вентилатора. Вътре в тази перка, която извадихме току що, се намира малкия магнит, на който реагира датчика ни.

За един оборот на оста на вентилатора, датчикът на Хол сработва 2 пъти. По този начин, вентилаторът започва да се върти. неговите намотки, включени в една верига с датчика образуват генератор на електрочески колебания, който развърта пропелера. При това, датчикът на Хол работи и като датчик за числата на оборотите, с които се върти перката. По този начин ги стабилизита.
Самият датчик се намира в процепа на печатната платка на мотора.

При това е трудно да се различи на пръв поглед стария вентилатор (с два извода), от съвременния (с три извода), който струва много повече!

Като цяло, в старите вентилатори отсъства трети проводник... Устройството им е еднакво...
Е да се върнем при нашето изобретение - датчикът на Хол. Вече го намерихме. Но как да определим изводите му? Много просто! Гледаме надписите на печатната платка на охладителя. Трябва да се обърне внимание, че цветовете на кабелите на вентилатора се различават от общоприетите компютърни цветове... Червеният проводник не е +5 волта, а е +12 волта. Жълтият - сигнал за контрол на въртенето. Само черният е общ - както навсякъде.

Ето, че определихме включването на захранването към нашия охладител. Остана само да обърнем платката и да видим къде водят пътечките.
Датчикът на Хол има четири извода. Крайните са общ и плюс на захранващото напрежение. Проверяваме тяхното включване към проводниците за захранване, преминавайки по печатните пътечки. Двата средни извода - това са и точно тези изводи, участващи в управлението на въртене на двигателя и извеждат сигнала навън, за преброяване числото на оборотите на вентилатора.

Освен във вентилаторите, датчикът на Хол можем да намерим и във флопитата. Те определят положението на дискетата при всеки оборот на двигателя. Те се разполагат около ротора на основния двигател, който служи за движение на дискетата.

Този датчик се отличава малко от разгледания по-горе. Но свързването е по аналогичен път: два от изводите трябва да се свържат с общия и +12 волта. Това можем да проверим подавайки захранване на флопито и измерване на сигналите по изходите на датчика на Хол, въртейки шпиндела на флопито ръчно. На всеки оборот, датчикът ще дава по един импулс.
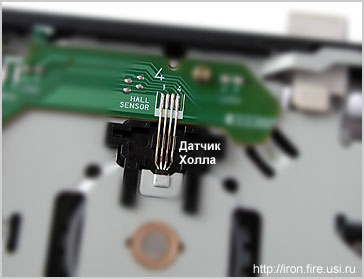
На това флопи датчикът дори е надписан!! Дреболия, а е толкова приятна! Втората изненадваща изненада - изводите на датчика са значително дълги!
Използването на датчика в Роботиката (и в други области на творчеството

е в качеството на датчик за въртене: малкия магнит се установява на въртящият се предмет (например - колелото), а датчикът се разполага така, че при въртенето, магнитът да преминава колкото се може по-близо до датчика! Също така, датчикът на Хол може да се използва за определяне на крайните положения на движеща се щанга (манипулатор-ръка или крак на робот). Разбира се, можем да поместим нашия датчик по средата и да определим неутралното положение на същият този робо-крак.
За разлика от оптичните датчици, които работят на отразена светлина и могат да бъдат облъчени от странични източници на инфрачервено лъчение и да дават сбой, датчикът на Хол реагира на близко до него магнитното поле. За да даде сбой устройството, трябва да се поднесе до него такъв мощен магнит, че по-скоро ще излезе от строя цялата електроника, а роботът ще се развали на парчета, които ще се залепят на магнита. :-D
Надявам се статията да ви е полезна!
Статията е авторска, като снимките са взаимствани от тук:
Източник


 :robocop:
:robocop: