1
Робо-сумо / Роботи клас Нано-сумо
« -: Април 24, 2014, 07:16:00 pm »
Здравейте, колеги!
Никога не съм крил любовта си към дисциплината, та поради тази причина, от около половин година съм подхванал следния проект:
Към момента разполагам с:
- 2 бр. инфрачервени сензори за разстояние;
- 2 бр. датчици за линия (специално проектирани за клас нано-сумо) - на една платка. Също така, отпреди години имам останали още около 230 броя платки за сензори RPR-220, като единствено може да се използва 1 на робот;
- 2 бр. мотори с планетарен механизъм (реално са най-малките на света), с размери 20х6мм;
- 1 бр. MegaBitty микроконтролер с вградени драйвери за моторите - размери: 23х23мм;
- 1 бр. едноклеткова LiPo батерия 50mAh (Все още не съм направил зарядно за нея).
- 2 бр. О-пръстени 12х1мм, с които ще задвижвам колелцата.
Снимка на мотора:

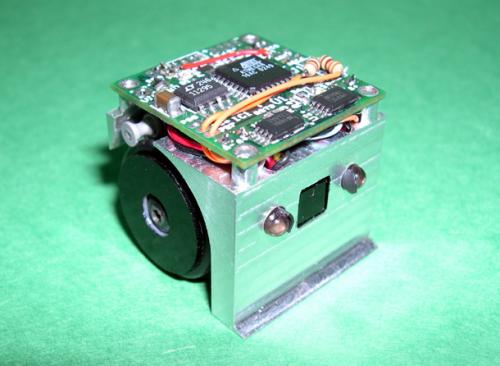
Снимка на контролера MegaBitty:

За любопитнитите, клас Нано-сумо представлява състезание с роботи, по правилата на сумото, но реално това са най-малките видове в дисциплината. Границите, в които трябва да се вписват роботите са 25х25х25мм и 25гр. Размерът на ринга е 192,5х6мм.
Всъщност, проектирането на механиката за такъв, а също така и самото запояване на компонените по платките (0402 SMD корпуси) е извънредно трудно начинание. Самите платки (контролерът и сензорите) са купени, като дойдоха във вид на "кит" - т.е. сам трябва да си ги запоиш. За целта съм си купил и лупа за електроника, очила-лупи (наложителни са при този вид SMD монтаж). Поялник за SMD нямам, общо взето действам с поялната станция отпреди години...
Самите платки (контролерът и сензорите) са купени, като дойдоха във вид на "кит" - т.е. сам трябва да си ги запоиш. За целта съм си купил и лупа за електроника, очила-лупи (наложителни са при този вид SMD монтаж). Поялник за SMD нямам, общо взето действам с поялната станция отпреди години...
Поздрави!
П.п. В момента разполагам с 3 робота в клас мини-сумо и 1 ринг, като 2 от тях са напълно функциониращи, а 1 от тях е разглобен "на съставни". Мислех да навляза в клас микро-сумо (50x50мм), но в крайна сметка ми се искаше да видя какво ще е в най-малките размери на дисциплината...
Никога не съм крил любовта си към дисциплината, та поради тази причина, от около половин година съм подхванал следния проект:
Към момента разполагам с:
- 2 бр. инфрачервени сензори за разстояние;
- 2 бр. датчици за линия (специално проектирани за клас нано-сумо) - на една платка. Също така, отпреди години имам останали още около 230 броя платки за сензори RPR-220, като единствено може да се използва 1 на робот;
- 2 бр. мотори с планетарен механизъм (реално са най-малките на света), с размери 20х6мм;
- 1 бр. MegaBitty микроконтролер с вградени драйвери за моторите - размери: 23х23мм;
- 1 бр. едноклеткова LiPo батерия 50mAh (Все още не съм направил зарядно за нея).
- 2 бр. О-пръстени 12х1мм, с които ще задвижвам колелцата.
Снимка на мотора:
Снимка на контролера MegaBitty:
За любопитнитите, клас Нано-сумо представлява състезание с роботи, по правилата на сумото, но реално това са най-малките видове в дисциплината. Границите, в които трябва да се вписват роботите са 25х25х25мм и 25гр. Размерът на ринга е 192,5х6мм.
Всъщност, проектирането на механиката за такъв, а също така и самото запояване на компонените по платките (0402 SMD корпуси) е извънредно трудно начинание.
Самите платки (контролерът и сензорите) са купени, като дойдоха във вид на "кит" - т.е. сам трябва да си ги запоиш. За целта съм си купил и лупа за електроника, очила-лупи (наложителни са при този вид SMD монтаж). Поялник за SMD нямам, общо взето действам с поялната станция отпреди години...Поздрави!
П.п. В момента разполагам с 3 робота в клас мини-сумо и 1 ринг, като 2 от тях са напълно функциониращи, а 1 от тях е разглобен "на съставни". Мислех да навляза в клас микро-сумо (50x50мм), но в крайна сметка ми се искаше да видя какво ще е в най-малките размери на дисциплината...







 Всичко е на фона на творческия хаос
Всичко е на фона на творческия хаос . Основните забележки по ецването са, че след като пистите се пренесат с ютия върху текстолита, трябва всички пътечки и точки да се повторят с маркер. Хартията от листа (при мен беше плакат) остава по пистите, но това да не ви притеснява! Ецването на 4 платки на мен ми отне 1 час и 20-30 минути с разтвор, в който правя платки за 4-ти път. Т.е. в по-нов разтвор ще се ецнат за по-кратко. Разклащам през 10-15 минути.
. Основните забележки по ецването са, че след като пистите се пренесат с ютия върху текстолита, трябва всички пътечки и точки да се повторят с маркер. Хартията от листа (при мен беше плакат) остава по пистите, но това да не ви притеснява! Ецването на 4 платки на мен ми отне 1 час и 20-30 минути с разтвор, в който правя платки за 4-ти път. Т.е. в по-нов разтвор ще се ецнат за по-кратко. Разклащам през 10-15 минути.